
- 2019/08/06
Summary
コウモリが複数の標的に対して超音波ソナーと飛行の注意を分散させ,次の獲物を先読みしていることが明らかとなった。コウモリはこの“先読みナビゲーション”によって,多くの獲物を効率よく次々と捕らえていたのだと言えるだろう。
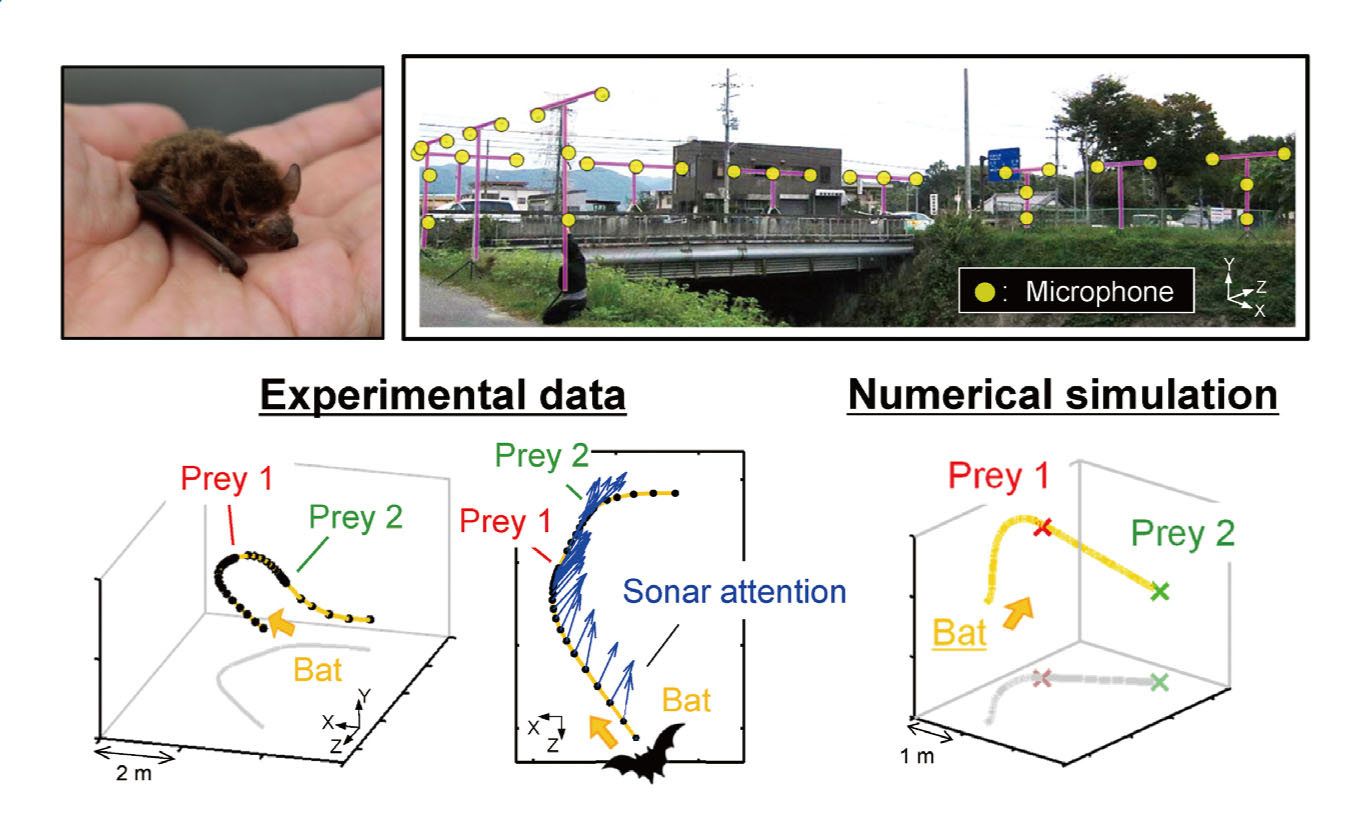
コウモリは超音波ソナーで獲物を検知する。日本に広く生息するアブラコウモリ(図左上)は,ユスリカ等の微小な飛翔昆虫を捕食している。彼らは大食漢で,一晩の採餌で体重が約20 % 増加した報告がある。さらに,採餌中の計測からは,1秒未満という非常に短い時間間隔で連続的に獲物を捕食する様子も観測されている。このとき,コウモリは目前の獲物のみに集中しているのだろうか。それとも,次の標的にも注意を分散させているのだろうか。
これを実験的に調べるには,コウモリのソナーの注意方向を調べることが有効である。ソナーの注意方向とは超音波の放射方向,つまり“音の視線”である。筆者らは,野外にてマイクロホンアレイ(図右上)を構築し,獲物捕食時の三次元飛行軌跡とソナーの注意方向を計測した。その結果,コウモリは目の前の獲物だけでなく,その次の獲物に対してもソナーの注意を向けていることが分かった(図左下)。
では,コウモリは次の獲物を見据えた合理的な飛行ルートを選択していたのだろうか。筆者らは,2匹の獲物の位置情報に応じて軌道を変化させる数理モデルを構築して,これを検証した。捕食成功率を数値シミュレーションで調べた結果,目前の獲物に接近する際に,次の獲物から少し離れるような軌道(図右下)を描いた際に最適となった。実験データからも,同様の軌道パターンを示すパラメータが推定された。つまり,コウモリは“飛行の注意”を次の獲物にも分散させていたのである。
本研究によって,コウモリが複数の標的に対してソナーと飛行の注意を分散させ,次の獲物を先読みしていることが明らかとなった。コウモリはこの“先読みナビゲーション”によって,多くの獲物を効率よく次々と捕らえていたのだと言えるだろう。この発見により,複数の標的に効率よく注意を向ける機構(選択的注意機構)や,ロボットの軌道計画の研究分野においてコウモリが新しいモデルとなることが期待される。
同志社大学 藤岡 慧明,飛龍 志津子
(出典: 学会誌「比較生理生化学」Vol.36 No.2 表紙より)